Betamax created with advanced security technology for kepeng.io community to stay connected 24/7 with their crypto and NFTs assets. From send, receive, and store $AVAX, $KPG to collect your valuable NFTs bought exclusively on Baliola NFT Marketplace.
Betamax is ‘one-stop wallet’ that has many functions

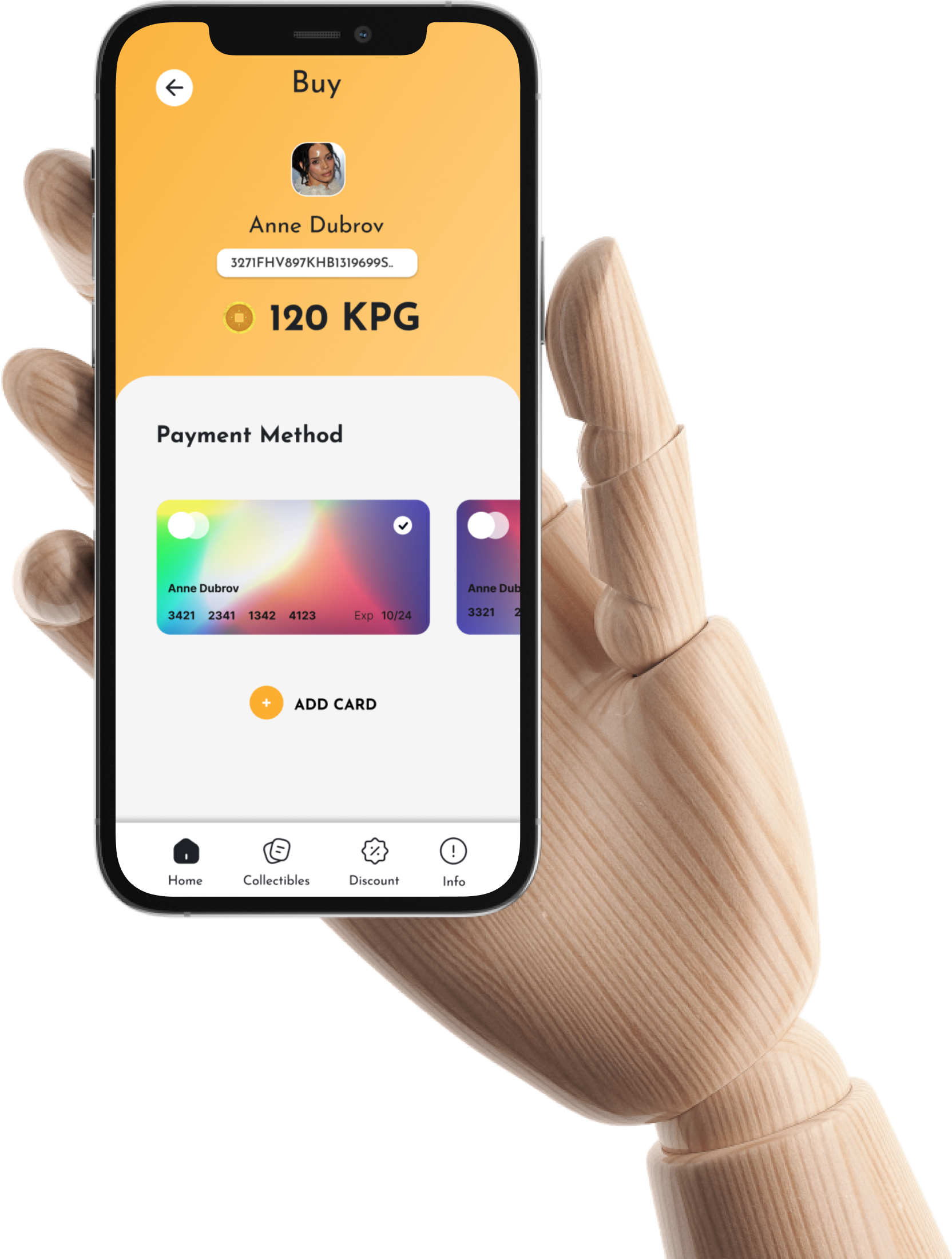
You can find send, receive, transaction KEPENG here

You can buy your NFT in Baliola and you can collect it on Betamax Wallet

Get many discount from every transaction by KEPENG (KPG)
Betamax has many feature that will help you to find, send, receive, transaction KEPENG (KPG) and collect your NFT
You can receive KEPENG (KPG) from the other person
Send and sharing KEPENG (KPG) to your friends
Save your NFT from Baliola. You can see your collection only from your wallet
Start to use Betamax Wallet to transaction by KEPENG (KPG) and collect your NFT from Baliola